 |
| Home │ Audio
Home Page |
Copyright © 2010 by Wayne Stegall
Updated July 21, 2010. See Document History at end for details.
Spice verfied.
Simple DC Servos
Introduction
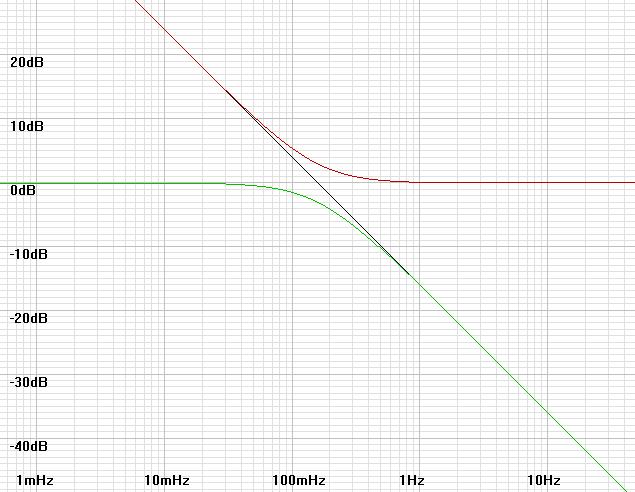
The hope of direct coupling some desireable audio circuits may be challenged by high DC offset, perhaps due to compromises made to gain some other desireable outcome. Adding or increasing DC feedback is necessary here. Second order servos are often used because a second passive pole is desired to decouple the typical op-amp integrator from the signal path. Second order servos, however, require carefull juggling of gain and phase shift factors to prevent subsonic oscillation. A simple integrator stage would do, but most would find the connection of the op-amp output into the signal path disagreeable. Here I suggest adding to the integrator a zero matching and cancelling the pole of the second stage to create a two stage first order servo. With a constant servo phase shift of -90°, design can proceed without worry of oscillation at all.| Figure
1:
Bode
plot
shows
how
response of integrator with zero (red
plot) adds to that of the second stage lowpass pole (green plot) to
create a first order integrator response (connecting black plot). |
 |
| Figure
2:
Non-inverting
and
inverting
two
stage first order servos. |
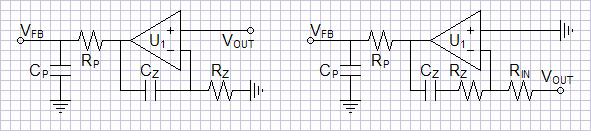 |
A disadvantage of this design is that the output signal is present in full with boosted DC error signal at output of the integrator awaiting suppression by second stage. Biasing of the servo must allow headroom for AC component.
Calculations
The final highpass pole will be at the frequency where |βservo| = |βglobal|. β is feedback factor or gain of feedback loop.To prove this assertion and give you useful servo equations, include both feedback factors in the closed-loop feedback gain equation:
| AV-CL = |
AV-OL
1+AV-OLβ |
= |
AV-OL
1+AV-OL(βglobal+βservo) |
| AV-CL = |
AV-OL
1+AV-OL(βglobal+βservo) |
= |
AV-OL
AV-OL(βglobal+βservo) |
= |
1
(βglobal+βservo) |
| AV-CL = | 1
βglobal - jβservo |
= |
1
βglobal(1 - j) |
, (j here is a vector number with
a 90º degree direction) |
These equations ideally include the high-frequency effects that require compensation calculations, but here are used only as they affect servo operation.
The servo feedback factor is inversely proportional to frequency. Where ω = 2πf = 1/T and ωpz is the frequency of the integrator zero and of the second stage pole:
| βservo = βservo0 |  |
ωpz
ω |
 |
= βservo0 | |
fpz
f |
|
| βservo0 = | Rz
Rin |
Exact calculations depend on the particular setup. Refer to the example below for details.
Example
As an example I will add a non-inverting servo of this type to the voltage feedback amplifier of Musical Feedback Amplifiers. It will function in this circuit to automatically bias the amplifier as well as reduce offset. Offset will not be as low as it would be if servo was not acting to bias the ciruit as well, but it should still be good. As a desirable side effect, driving the circuit bias will put the op-amp in class A operation, reducing the urge to use separate power supplies.The following circuit was unstable without compensation according to SPICE1 modeling. With dominant pole compensation of pole frequency >= 20kHz, it showed stable results. I tried poles approaching 100kHz with good results also. Its asymmetrical design should ensure even and odd harmonics for those with that preference.
The design proceeds as follows:
- Make transistor choices. (I chose LSK170A JFETs and 2N3906 PNPs for these analyses, other choices would work well too.)
- Decide power supply voltages.
- Choose RL (and R1 and R2 if used) for desired output impedance (in this case 1kΩ).
- Choose RBE to set bias through Q1. Check Q1 datasheet for a proper value here.
- Choose CC for desired compensation pole frequency. (Ordinarily this involves examining the loop gain (AV-OLβglobal) in great detail, here SPICE should show whether our pole chosen for musical reasons will result in oscillation.)
- Simulate circuit in SPICE with reasonable RS to negative power supply (RS = VSS/2ID will do) and adjust compensation if needed.
- Choose servo break frequency of 159.155mHz for even 1sec time constant.
- Choose op-amp. Any will do that will operate on the chosen power supply. High DC gain and low output offset are desired, other parameters are less critical, bandwidth can be low. The LF411 is often chosen for this sort of application.
- Calculate RS to meet anticipated servo bias (i.e. terminated to -7.5V)
- Calculate R2S and R3S to drive desired servo bias from op-amp biased at output at 0V at reasonable current value within specs.
- Calculate feedback factors then calculate actual integrator pole and zero frequencies.
- From these calculate and choose remaining servo component values.
- Simulate and verify final circuit in SPICE.
Output impedance in calculations is open-loop. Closed loop output impedance will be reduced by the feedback factor (AOL/ACL). Adding a small resistance (100Ω-1kΩ) on the output can give short circuit protection where an external cable is driven.
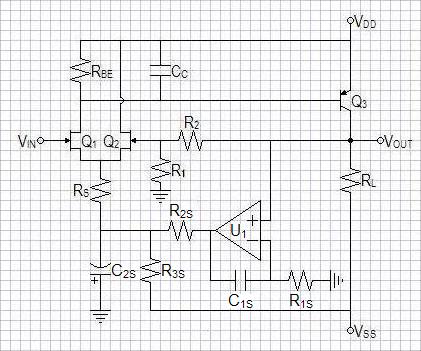
| Figure 3: Simplest
voltage-feedback op-amp with non-inverting
feedback network and DC servo. |
 |
| Figure 3: LSK170A SPICE model for reference |
| .MODEL LSK170A NJF + BETA = 0.0378643 VTO = -0.4025156 LAMBDA = 4.783719E-3 + IS = 3.55773E-14 + RD = 10.6565 RS = 6.8790487 + CGD = 3.99E-11 CGS = 4.06518E-11 + PB = 0.981382 FC = 0.5 + KF = 0 AF = 1 |
Amplifier Design and Compensation Procedure
Choose LSK170A JFETs and 2N3906 PNPs for these analyses
Choose power supplies as +-15V.
ZOUT = RL || (R1 + R2) = 1kΩ.
Choose RL = 2kΩ, therefore R1 + R2 = 2kΩ.
For gain of 10, R1 = 200Ω, R2 = 1.8kΩ. (Ideal gain formula here is ACL = 1 + R2/R1)
iB-Q3 = -VSS/(hfe x ZOUT) = 15/(100 x 2kΩ) = 75µA.
LSK170A has min IDSS of 2.6mA, choose iD = 2mA and calculate RBE.
RBE = vbe/(iD - iB-Q3) = 700mV/(2mA - 75µA) = 363.6363636Ω.
Round up to nearest standard 5% value: RBE = 360Ω.
rb-Q3 = VT/iB-Q3 = 25mV/75µA = 333.3333333Ω. (VT is the temperature dependent characteristic voltage of a PN junction, usually 25-26mV)
RPOLE = RBE || rb-Q3 = 360Ω || 333.3333333Ω = 173.0769231Ω
Calculate compensation capacitor for 20kHz dominant pole.
| CPOLE = |
1
2πfPOLERPOLE |
= |
1
2π x 20kHz x 173.0769231Ω |
= 45.97809467nF |
CC = CPOLE - Cb, because CPOLE >> Cb, CC (approx.)= CPOLE = 45.97809467nF.
Choose standard value CC = 47nF.
ID = 700mV/360Ω + 75µA = 2.01944mA
Calculate source output impedance rs
| rs = |
1
gfs |
= |
1
2 x sqrt(knID) |
= |
1
2 x sqrt(37.8643mA/V2 x 2.01944mA) |
= 57.1794Ω |
Servo Design Procedure
Choose break frequency of 159.155mHz for even 1sec time constant.
Choose LF411 operational amplifier.
Want first stage of servo at 0V DC bias to drive C2S of second stage to -7.5V
VGS = VT + sqrt(ID/kn) = -402.516mV + sqrt(2.01944mA/37.8643mA/V2) = -171.575mV
IRS = 2 x ID = 4.03889mA
Calculate R terminated to -7.5V:
RS = (7.5V + |VGS|)/(iD x 2) = (7.5V + 171.575mV)/4.03889mA = 1.89943kΩ.
Round down to nearest 5%. Choose RS = 1.8kΩ.
Calculate R2S for 10mA op-amp output:
R2S = 7.5V/10mA = 750Ω.
R3S = 7.5V/(10mA + 4.03889mA) = 534.23Ω.
Round up to nearest 5%. Choose R3S = 560Ω.
Now calculate to set servo break frequency. Begin by calculating the feedback factors.
| βglobal = | 200Ω
1.8kΩ + 200Ω |
= 0.1 |
| βservo-stage2 = |
1.8kΩ || 560Ω
1.8kΩ || 560Ω + 750Ω |
= |
427.119Ω
427.119Ω + 750Ω |
= |
427.119Ω
427.119Ω + 750Ω |
= 362.851m(V/V) |
| βatQ1Q2source = |
rs
RS || rs |
= |
57.1794Ω
1.8kΩ + 57.1794Ω |
= 30.7883m(V/V) |
Where ω = 2πf = 1/T:
| βglobal = 0.1 = βservo = βservo0 | |
ωpz
ω |
|
= |
βservo0
2πfhpTpz |
| Tpz
= |
βservo0
2πfhpβglobal |
= |
11.1716m(V/V)
2π x 159.155mHz x 0.1 |
= 111.716msec |
C2S = Tpz/Rservo-pole-2ndst = 111.716msec/272.138Ω = 410.512µF
Round to nearest standard 5% value: Choose C2S = 430µF.
Choose R1S = 330kΩ and calculate C1S:
C1S = Tpz/R1S = 111.716msec/330kΩ = 338.533nF
Round to nearest standard 5% value: Choose C1S = 330nF.
SPICE Results
Output offset = -13.3143µVFrequency response: 0.17378Hz - 660.7kHz +0,-3dB (Deviation of servo pole from chosen 0.159155Hz is negligible)
SNR = 109.875dB
Integrator output bias: -1.33143V (You would want to trim R2S or R3S (and perhaps C2S) if this value was too far from 0V)
Fourier analysis for vout @ 1kHz:
No. Harmonics: 10, THD: 0.0296942 %, Gridsize: 200, Interpolation Degree: 1
| Harmonic | Frequency | Magnitude | Phase | Norm. Mag | Norm. Phase |
| -------- | --------- | --------- | ----- | --------- | ----------- |
| 0 | 0 | 0 | 0 | 0 | 0 |
| 1 | 1000 | 1.01354 | -90.074 | 1 | 0 |
| 2 | 2000 | 0.000300274 | -164.01 | 0.000296263 | -73.939 |
| 3 | 3000 | 2.02959e-005 | -73.348 | 2.00248e-005 | 16.7261 |
| 4 | 4000 | 9.88967e-007 | 11.5644 | 9.75756e-007 | 101.639 |
| 5 | 5000 | 3.507e-007 | -179.5 | 3.46015e-007 | -89.429 |
| 6 | 6000 | 1.89024e-007 | 74.622 | 1.86499e-007 | 164.696 |
| 7 | 7000 | 5.40419e-007 | -6.6935 | 5.332e-007 | 83.3809 |
| 8 | 8000 | 1.70615e-007 | -125.83 | 1.68336e-007 | -35.755 |
| 9 | 9000 | 6.05319e-007 | 160.262 | 5.97233e-007 | 250.337 |
SPICE Model for circuit of figure 31.
|
|
1Links to supporting SPICE
models on this
website: LSK170.txt,
models1.txt
Document History
July 20, 2010 Created
July 21, 2010 Elaborated servo equations to better
clarify integrator response.