 |
| Home │ Audio
Home Page |
Copyright © 2017 by Wayne Stegall
Updated July 14, 2017. See Document History at end for
details.
|
|
State Variable Tone Control
Introduction
Tone controls are often spoken of as harming audio sound. Often capacitors are said to blame. Here I propose that a state-variable tone control would diminish or eliminate capacitor distortion although replacing it with op amp distortion instead.Preliminary Evaluation
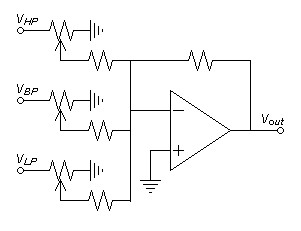
As an intuitive first try it seems that an integrator, a simple
inverting stage, and a differentiators in the inner loop of an overall
inverting stage with equal global feedback from each would create the
desired function. The global feedback loop would force the sum of
the three to be flat gain and as result the integrator output would
become
lowpass (bass), the inverting stage output would become bandpass
(midrange), and the differentiator output would become highpass
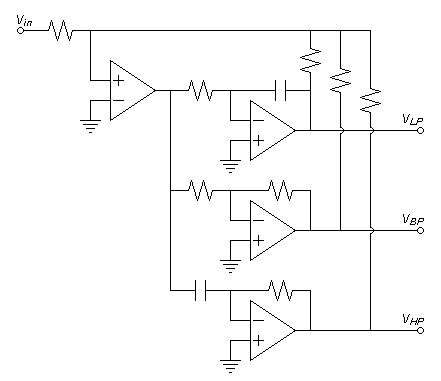
(treble). This circuit is shown in figure 1 and its SPICE model in figure 2.| (1) |
Hsum-inner-loop(s) = |
s
ωhp |
+ | 1 | + |
ωlp
s |
| Figure 1: First schematic. |
 |
| Figure 2: First SPICE model. |
| * xover 300 and 5kHz v1 vin 0 dc 0 ac 1 sin 1.41421 0 rin vin 0 47k emain emo 0 emvp 0 100k r1 vin emvp 10k rfi emvp eio 10k rfu emvp euo 10k rfd emvp edo 10k eint eio 0 0 eivn 100k ri1 emo eivn 10k ci1 eivn eio 53n euni euo 0 0 euvn 100k ru1 emo euvn 10k ru2 euvn euo 10k ediff edo 0 0 edvn 100k cd1 emo edvn 6.77n rd1 edvn edo 4.7k .end .control ac dec 30 2 200k plot db(eio) db(euo) db(edo) plot db(eio+euo+edo) .endc |
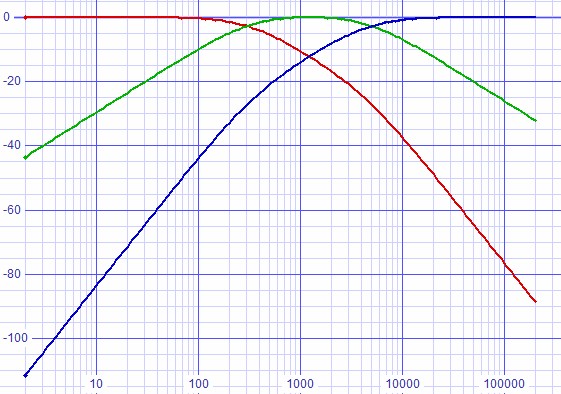
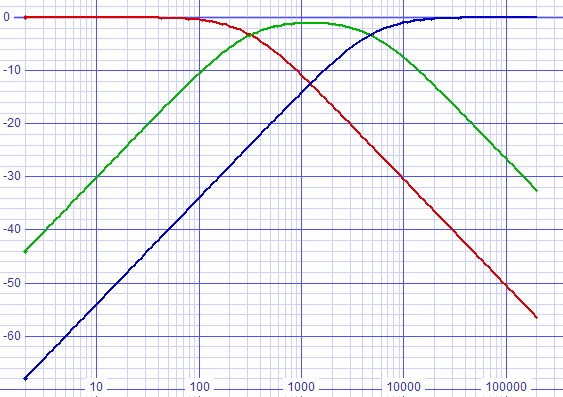
The bode plot from the SPICE emulation shows an anomaly. Where the lowpass section was desired to have a single pole at ωlp, it instead has another pole at ωhp after which it rolls off with second order slope. The highpass section is affected in a similar way. Each section is divided by the summed response to get the flat summed result giving two poles to each section.
| Figure
3:
Bode
plot
shows
two poles each for lowpass and highpass functions.: |
 |
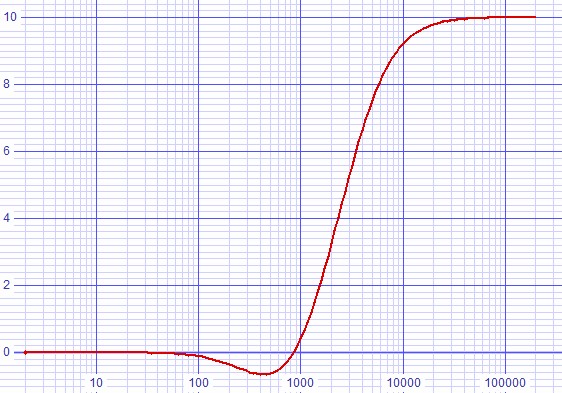
This seems acceptable until one of the sections is adjusted then the extra phase shift creates a response anomaly. Figure 4 below shows the anomaly in the summed response with treble boost.
| Figure 4: Treble boost reveals two pole anomaly. |
 |
Add Compensating Zeros
It seems now that zeros have to be added to the integrator and
differentiator to eliminate second-order response from the lowpass and
highpass sections. Now since intuition has failed, proceed by
fully calculating all parameters.Derive equations
First calculate the summed response which inverted becomes the midrange curve. Begin with separate poles and zeros.| (2) |
Hsum′(s) = |
(s + ωlp)(s + ωhp)
s |
Multiply them together.
| (3) |
Hsum′(s) = |
s2 + s(ωlp
+ ωhp) + ωlpωhp
s |
Divide numerator by denominator to distinguish integrator, flat, and differentiator functions.
| (4) |
Hsum′(s) = |
s + (ωlp + ωhp) + | ωlpωhp
s |
Divide by ωhp to attain normal scale.
| (5) |
Hsum(s) = |
H′(s)
ωhp |
= |
s
ωhp |
+ | ωlp + ωhp
ωhp |
+ |
ωlp
s |
Show scaled pole/zero form for completeness.
| (6) |
Hsum(s) = |
(s + ωlp)(s + ωhp)
sωhp |
Add zero at ωhp to integrator.
| (7) |
Hint+zero(s) = | ωlp
s |
+ |
ωlp
ωhp |
= |
(s
+ ωhp)ωlp
sωhp |
Divide integrator response by summed response to reveal lowpass function.
| (8) |
Hlp(s) = |
|
= |
ωlp
s + ωlp |
Add zero at ωlp to differetiator.
| (9) |
Hdiff+zero(s) = | s
ωhp |
+ |
ωlp
ωhp |
= |
s
+ ωlp
ωhp |
Divide differetiator response by summed response to reveal highpass function.
| (10) |
Hhp(s) = |
|
= |
s
s + ωhp |
Obtain function of flat-response section by subtracting the integrator and differentiator functions with zeros from the summed response.
| (11) |
Hflat(s) = Hsum(s) – Hint+zero(s) – Hint+zero(s) |
| (12) |
Hflat(s) = |  |
s
ωhp |
+ | ωlp + ωhp
ωhp |
+ |
ωlp
s |

|
– |
|
ωlp
s |
+ |
ωlp
ωhp |
|
– |
|
s
ωhp |
+ |
ωlp
ωhp |
|
| (13) |
Hflat(s) = 1 – | ωlp
ωhp |
Divide flat-response section response by summed response to reveal bandpass function.
| (14) |
Hbp(s) = |
|
= |
s(ωhp – ωlp)
(s + ωlp)(s + ωhp) |
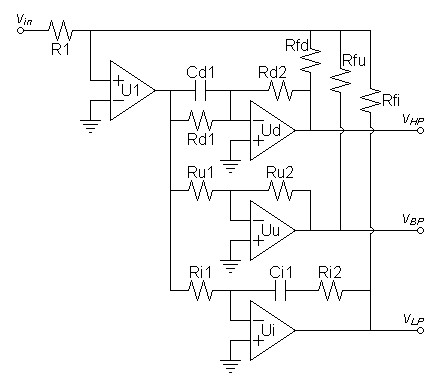
Now these calculations define the new circuit of figure 5 below.
|
|
| Figure 5: Second circuit adds zeros to integrator and differentiator sections. |
 |
Calculate circuit values.
Choose flp = 300Hz and fhp = 5kHz. Set primary resistances to 10kΩ.| (15) |
Ci1 = |
1
2πflpRi1 |
= |
1
2π × 300Hz × 10kΩ |
= 53.0516nF |
| (16) |
Ri2 = Ri1 × | flp
fhp |
= 10kΩ × | 300Hz
5kHz |
= 600Ω |
| (17) |
Cd1 = |
1
2πfhpRd2 |
= |
1
2π × 5kHz × 10kΩ |
= 3.1831nF |
| (18) |
Rd1 = Rd2 × | fhp
flp |
= 10kΩ × | 5kHz
300Hz |
= 166.667kΩ |
| (19) |
Ru2 = Ru1 | |
1 – | flp
fhp |
|
= 10kΩ |
|
1 – | 300Hz
5kHz |
|
= 9.4kΩ |
Run SPICE simulation
| Figure 6: Second SPICE deck using calculated values. |
| * xover 300 and 5kHz v1 vin 0 dc 0 ac 1 sin 1.41421 0 rin vin 0 47k emain emo 0 emvp 0 100k r1 vin emvp 10k rfi emvp eio 10k rfu emvp euo 10k rfd emvp edo 10k eint eio 0 0 eivn 100k ri1 emo eivn 10k ci1 eivn ri2ci1 53.0516n ri2 ri2ci1 eio 600 euni euo 0 0 euvn 100k ru1 emo euvn 10k ru2 euvn euo 9.4k ediff edo 0 0 edvn 100k cd1 emo edvn 3.183n rd1 emo edvn 166.667k rd2 edvn edo 10k .end .control ac dec 30 2 200k plot db(eio) db(euo) db(edo) plot db(eio+euo+edo) .endc |
| Figure
7:
Response
now
lacks
the
unwanted
extra
zeros. |
 |
Complete circuit
Now only a summer like that of figure 8 below need be attached to the output to adjust bass, midrange, and treble.| Figure 8: Inverting Summer |
 |
|
|
Stability Design
If all of the op amps in the state variable circuit have the same
bandwidth, the circuit is expected to oscillate. A Texas
Instruments paper says that if two op amps are in the same feedback
loop, stability is possible if their bandwidths differ by a ratio of
5.1 Even then experimentation is
required. There is much
reason to believe that the wider bandwidth amps should be in the inner
feedback loop functions for the following reasons:- Wide bandwidth op amps prefer the shorted feedback paths.
- The inner loop amps with their feedback are more likely to reduce phase shift by the application of the inner feedback loops by the time the narrower bandwidth amps run out of gain.
|
|
1Ron Mancini, "Analyzing feedback loops containing secondary amplifiers," 2005, Texas Instruments, ti.com, link.
Document History
July 14, 2017 Created.
July 14, 2017 Corrected some grammar and omissions.
July 14, 2017 Added footnote validating reference referred in
Stabiility Design..