 |
| Home │ Audio
Home Page |
Copyright © 2013 by Wayne Stegall
Updated December 9, 2015. See Document History at end for
details.
Single-slope Safe-area Limiter
and
other transistor limiters
Introduction
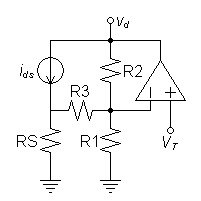
There are several transistor limiter circuits of which the singe-slope safe-area limiter is the most interesting. All use the turn-on voltage (VT) of a bipolar transistor to trigger the desired limit. This VT may not be the usual 0.7-1V of normal operation but rather a 0.60-0.65 required to barely turn the bipolar transistor on depending on how much current the input signal can supply to the collector of Q1 under limit..Current Limiter
The current limiter of figure 1
below measures current with the shunt resistor (RS) whose
value is chosen to turn on the bipolar transistor when the current
limit is reached. This circuit becomes a current source instead
if the input to RI is taken from an appropriate DC bias.| Figure
1:
Current
Limiter |
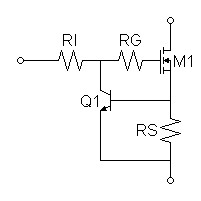 |
| (1) |
ILIMIT = |
VT
RS |
Voltage Limiter
The voltage limiter of figure 2
below uses a resistive voltage ladder to scale the desired voltage
limit to the bipolar turn-on threshold..| Figure
2:
Voltage
Limiter |
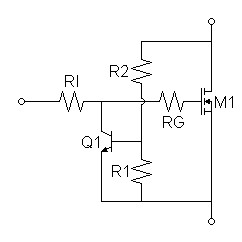 |
| (2) |
VLIMIT = |
 |
R1 + R2
R1 |
 |
× VT |
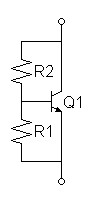
Because power supplies are typically constant voltage, transistors are chosen with voltage limits in excess of supply voltage and therefore usually do not need protection from overvoltage in isolation. The voltage limiter is instead more often used for voltage biasing and appears most often in the circuit of figure 3, the amplified diode.
| Figure
3:
Amplified
diode |
 |
Single Slope Safe-area Limiter
If the previous limiters were overly simple, the safe-area limiter of figure 4 becomes much more complex. Here voltage and current signals are combined to limit the weighted sum of the two. Under limiting conditions this circuit acts as a negative resistance. This circuit becomes strictly a negative resistance instead if the input to RI is taken from an appropriate DC bias.| Figure
4:
Safe-area
Limiter |
 |
Graphical Analysis
It is useful at first for understanding to examine the graphical analysis of this circuit. Begin a plot with specified load line and power limitations.| Figure
5:
Specified
load-line
and
power
limit
boundaries |
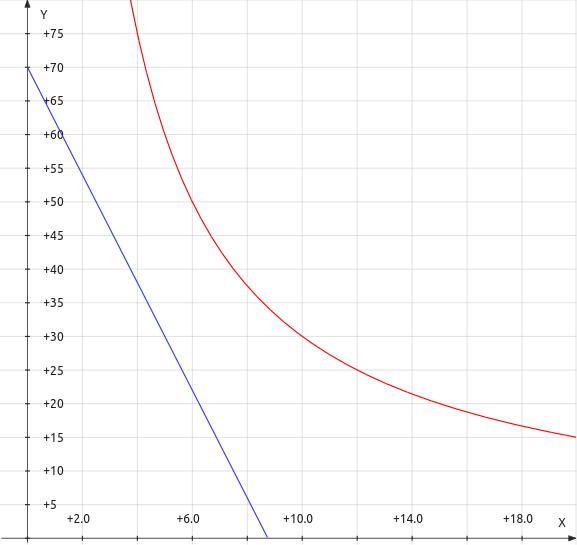 |
| Legend: — load line — power limit |
Then plot a limit line between the load line and the curve representing the power dissipation limit. In figure 6 below, a limit parallel with load line and touching the maximum power dissipation line is drawn. Any limit in the range between the load line and power limit could be plotted, so figure 7 below shows a limit line more likely to cause limiting on signal peaks.
| Figure
6:
Illustration
of
a
parallel
limit
line
positioned
for
maximum
power |
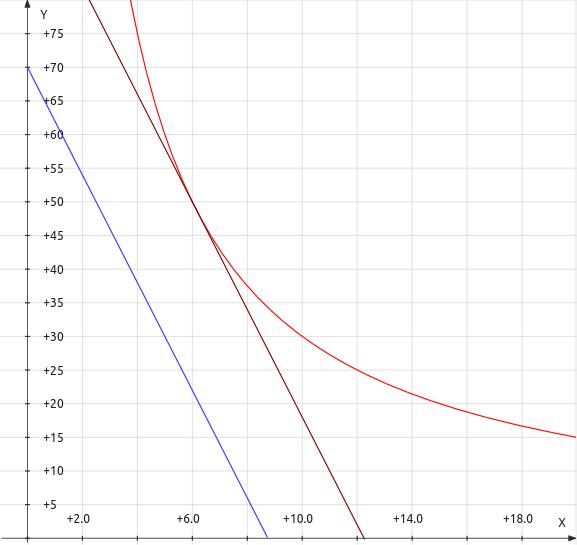 |
| Legend: — load line — power limit — limit line |
| Figure
7:
Illustration
of
a
limit
more
likely
to
activate
at
peak
signal |
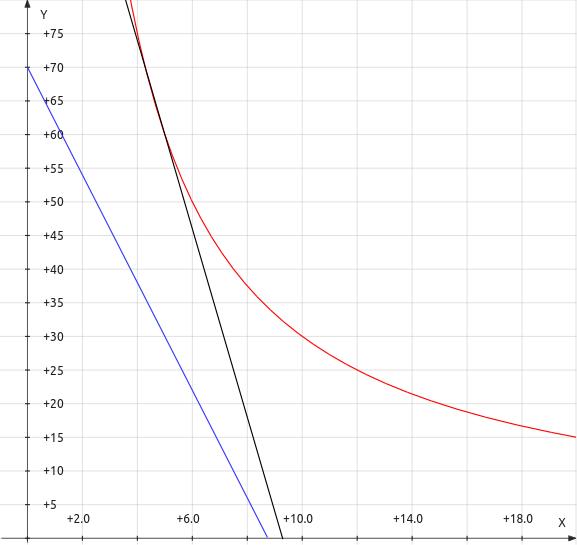 |
| Legend: — load line — power limit — limit line |
Once a limit line is established, it can be defined by calculating two end-points
Mathematical Analysis
At this point it would be desirable to choose R1 and calculate R2 and R3, however doing so would require solution of simultaneous non-linear equations. It is therefore desirable to specify the limit line in more general terms before calculating R2 and R3 by numerical methods.Therefore specify a general limit line equation
| (3) |
kvVDS + kiIDS = VT |
At this point the desire to place the limit line tangent to a maximum power curve requires power calculations:
| (4) |
VDS = |
VT
- kiIDS
kv |
= |
VT
kv |
– | ki
kv |
IDS |
| (5) |
P = IDSVDS = IDS | |
VT
kv |
– | ki
kv |
IDS | |
| (6) |
P = – | ki
kv |
IDS2 | + | VT
kv |
IDS |
Now take the derivative of power to locate maximum power point
| (7) |
dP dIDS |
= – | 2ki
kv |
IDS | + | VT
kv |
= 0 |
Maximum power occurs where the slope of the power is zero
| (8) |
2ki
kv |
IDS | = | VT
kv |
| (9) |
IDS | = | VT
2ki |
Now substitute the maximum power point back into the original power equation:
| (10) |
PMAX = |
VT
kv |
|
VT
2ki |
|
– | ki
kv |
|
VT
2ki |
|
2 |
| (11) |
PMAX = |
VT2
2kvki |
– | kiVT2
4kvki2 |
= | VT2
2kvki |
– |
VT2
4kvki |
| (12) |
PMAX = |
VT2
4kvki |
| If ZLIM = - |
ki
kv |
, then ki = |ZLIM|kv |
Therefore
| (13) |
PMAX = |
VT2
4|ZLIM|kv2 |
| (14) |
kv = |
|
At this point the general limit equation can be specified from the desired slope and maximum power limitation.
Component Calculations
Calculate kv from the endpoint conditions: VDS = VDS-MAX and IDS = 0Where kvVDS = VT:
| (15) |
kv = | R1 || R3
(R1 || R3) + R2 |
Calculate ki from the endpoint conditions: VDS = 0 and IDS = IDS-MAX
Where kvVDS = VT:
| (16) |
ki = | R1 || R2
(R1 || R2) + R3 |
The general limit line from equation 3 now becomes:
| (17) |
|
VD + |
R1 || R2
(R1 || R2) + R3 |
IDS = VT |
Although the value of R2 is generally tied to the VDS-MAX endpoint specified by kv and R3 to the IDS-MAX endpoint specified by ki, both resistances appear in both endpoint equations. This entanglement requires numerical computation. Now specify the calculations required.
Recursive equation for R2
Solve equation 15 for R2:
| (18) |
(R1 || R3) + R2 = | R1 || R3
kv |
| (19) |
R2 = | R1 || R3
kv |
– (R1 || R3) |
Recursive equation for R3
Solve equation 16 for R3:
| (20) |
(R1 || R2) + R3 = | R1 || R2
ki |
| (21) |
R3 = | R1 || R2
ki |
– (R1 || R2) |
The numerical calculation of R2 and R3 involves calculating equations 19 and 21 repeatedly until the results converge and do not change.
| Figure
8:
C++
code
for
calculating
safe-area
limiter
component
values |
| /* sal.cpp - prove the equations calculated to define a single-slope safe area limiter. */ #include <iostream> #include <cmath> using namespace std; #define PAR(x,y) ((x)*(y)/((x)+(y))) /* If convergence is at least as good as binary, iterations equal to the number of bits in the mantissa of a double are sure to produce double accuracy */ #define ITER 52 int main(void) { int i; double zlim, pmax, kv, ki, vt; double r1, r2, r3, rs, rtmp; double vmax, imax; // input values zlim = 8.0; pmax = 300.0; r1 = 68.0; rs = 0.1; vt = 0.763; // calculate limit line specifications kv = sqrt((vt*vt)/(4.0*zlim*pmax)); ki = kv*zlim; vmax = vt/kv; imax = vt/ki; // calculate component values r2 = r1; r3 = r1; for(i=0;i<ITER;i++) { rtmp = PAR(r1,r3); r2 = (rtmp/kv)-rtmp; rtmp = PAR(r1,r2); r3 = (rs*rtmp/ki)-rtmp; // watch results for convergence cout << "R2 = " << r2 << ",\t" << "R3 = " << r3 << endl; } // print remaining results cout << "Seed values:" << endl; cout << "R1 = " << r1 << ",\t" << "RS = " << rs << endl; cout << "VT = " << vt << ",\t" << "PMAX = " << pmax; cout << ",\t" << "ZLIM = " << zlim << endl; cout << "Endpoints: " << vmax << "V,\t" << imax << "A" << endl; return 0; } |
Figure 9: Program output for parameters given |
| R2 =
4332.06, R3 = 40.5156 R2 = 3234.86, R3 = 40.3043 R2 = 3224.26, R3 = 40.3016 ... R2 = 3224.13, R3 = 40.3016 Seed values: R1 = 68, RS = 0.1 VT = 0.763, PMAX = 300, ZLIM = 8 Endpoints: 97.9796V, 12.2474A |
To compile and run under linux, execute the following commands in the directory containing the source file:
- g++ sal.cpp -lm -o sal
- chmod +x sal
- ./sal
To compile and run under Visual Studio 6.0:
- Create and empty console project
- Copy file to project directory and add it to the project
- Compile and run
SPICE Results
- Initial expectations: Because I expect VT to be uncertain and the voltage presented by the Y-network of R1, R2, and R3 to operate exactly as calculated, correct results will show a correct limiting slope but a less correct distance to the maximum power point.
- Initially Spice Opus gave a slope of 9.2Ω, far enough from the specified 8Ω to leave me to scrutinize whether I had made the wrong calculations.
- After troubleshooting to distraction, I decided to simulate the circuit in a trial version of MultiSim. The slope now was near enough correct at 8.1Ω to believe that integration in Spice Opus was not converging properly. Because at some time I decided I would only use free versions of SPICE for demonstration of simulations in articles, I would have to find another way to demonstrate the results.
- Finally, I decided to try Spice Opus again. I would have to simplify something to get the simulation to converge. I decided that the type of protected transistor was less important than the operation of Q1 so I used the nonlinear controlled source function to model M1 as an ideal MOSFET. Now that the simulation gave a slope of 8.1Ω as MultiSim did, analysis could proceed.
- After the initial simulation gave the correct slope, I set VT
to the value of VBE value given by the OP
analysis and recalculated the components. The result, shown below
places the x and y intercepts much nearer their calculated values.
| Figure
10:
Illustration
of
a
limit
more
likely
to
activate
at
peak
signal |
 |
SPICE model |
Adjustments
If predicting VT leaves uncertainty in predicting the exact placement of the limit line in the final hardware circuit, R1 could be specified as a potentiometer so that adjustments can be made.A more direct component value calculation
Previously, an attempt to calculate R2 and R3 given R1 and RS run into
mathematical complexity. Here I proceed based on the idea that R2
and R3 have a special relationship. To illustrate this concept
and to proceed with new calculations, I assert that the circuit in
figure 11 below models the behavior of the safe-area limiter along the
limit line alone. This is true because the safe-area limiter
becomes a feedback circuit when limiting is invoked. Note that
model makes IDS the input and VD the controlled
output.| Figure
11:
An
op-amp
model
of
limit
line
only.: |
 |
On the presumption that this model is just a summing inverting op-amp circuit, the first equation can be specified.
| (22) |
VD = – | R2
R3 |
(RSIDS–VT) – | R2
R1 |
(0–VT) + VT |
Manipulate the equation to slope-intercept form.
| (23) |
VD = – | R2RS
R3 |
IDS + | |
R2
R3 |
+ |
R2
R1 |
+ 1 |
|
VT |
Now the assumed special relationship between R2, R3, and RS is plain:
| (24) |
ZLIM = – | R2RS
R3 |
It now appears easier to calculate R1 last. Derive a related calculation for R1.
| (25) |
IR1 = – | VD–VT
R2 |
+ | RSIDS–VT
R3 |
= |
VT
R1 |
| (26) |
R1 = |
|
Equation is then evaluated at any point on the limit line (VD,IDS).
At the voltage endpoint (VMAX,0) the equation simplifies to:
| (27) |
R1 = |
|
Evaluating from the current maximum or the limit line midpoint will produce the same results.
The design procedure becomes:
- Calculate general load line.
- Choose RS to give a voltage drop greater than VT
at IMAX.
- Choose R3 as best not to allow the base of Q1
to load the Y-ladder. I.e. Specifiy R1||R2||R3
<< rb-Q1 or IR1 >> IB.
(Often a good guess works here.)
- Calculate R2 from RS, R3, and ZLIM. (equation 24)
- Calculate R1 from previously calculated components. (equation 27)
- Simulate circuit and adjust design to simulated value of VT.
- Scale the Y-ladder to better meet the criterion of step 3 if
desired.
| Figure
12:
C++
code
for simpler calculations of safe-area
limiter
component
values. |
| /* sal2.cpp - prove the equations calculated to define a single-slope safe area limiter. */ #include <iostream> #include <cmath> using namespace std; #define PAR(x,y) ((x)*(y)/((x)+(y))) int main(void) { double zlim, pmax, kv, ki, vt; double r1, r2, r3, rs; double vmax, imax; // input values zlim = 8.0; pmax = 300.0; //r1 = 68.0; r3 = 40.3016; rs = 0.1; vt = 0.763; // calculate limit line specifications kv = sqrt((vt*vt)/(4.0*zlim*pmax)); ki = kv*zlim; vmax = vt/kv; imax = vt/ki; // calculate component values r2 = zlim*r3/rs; // calculate r1 at midpoint //r1 = vt/(((0.5*vmax)-vt)/r2+(rs*(0.5*imax)-vt)/r3); // calculate r1 at voltage endpoint r1 = vt/((vmax-vt)/r2 - vt/r3); // print results cout << "R2 = " << r2 << ",\t" << "R3 = " << r3 << endl; cout << "Seed values:" << endl; cout << "R1 = " << r1 << ",\t" << "RS = " << rs << endl; cout << "VT = " << vt << ",\t" << "PMAX = " << pmax; cout << ",\t" << "ZLIM = " << zlim << endl; cout << "Endpoints: " << vmax << "V,\t" << imax << "A" << endl; return 0; } |
Figure 13: Program output for parameters given |
| R2 = 3224.13,
R3 = 40.3016 Seed values: R1 = 68, RS = 0.1 VT = 0.763, PMAX = 300, ZLIM = 8 Endpoints: 97.9796V, 12.2474A |
More Power Calculations
The power calculations above produced results more suitable to calculate a parallel load line. Here derivation is made to facilitate calculations from power and current limit specifications instead, presuming that voltage limitations in a circuit are going be a matter of power supply design.Pick up from equation 12 above and derive formulas.
| (12) |
PMAX = |
VT2
4kvki |
| If ZLIM = - |
ki
kv |
, then kv = |
ki
|ZLIM| |
| (28) |
PMAX = |
|ZLIM|VT2
4ki2 |
| (29) |
|ZLIM| = |
4ki2PMAX
VT2 |
| (30) | IMAX = |
VT
ki |
, therefore ki =
|
VT
IMAX |
| (31) | PMAX = | |ZLIM|VT2
4 |
× |
IMAX2
VT2 |
| (32) | PMAX = | |ZLIM| × IMAX2
4 |
| (33) | |ZLIM| = | 4PMAX
IMAX2 |
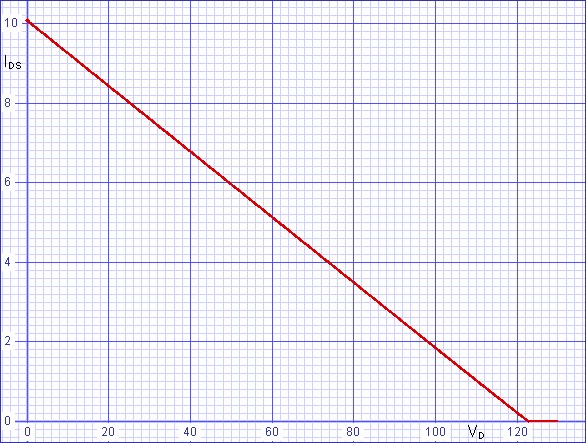
Now IMAX and |ZLIM| can be carried to the improved component calculation sequence above to finish the design. The program of figure 14 below does just that.
| Figure 14: C++ code for
calculation of safe-area limiter component values from power and
current limit specifications. |
| /* sal3.cpp - prove the equations calculated to define a single-slope safe area limiter. */ #include <iostream> #include <cmath> using namespace std; #define PAR(x,y) ((x)*(y)/((x)+(y))) int main(void) { double zlim, pmax, kv, ki, vt; double r1, r2, r3, rs; double vmax, imax; // input values imax = 10.0; pmax = 300.0; r3 = 47; rs = 0.1; vt = 0.763; // calculate limit line specifications zlim = 4*pmax/(imax*imax); // remaining limit line specifications are informational // and not necessary to finish calculations kv = sqrt((vt*vt)/(4.0*zlim*pmax)); ki = vt/imax; kv = ki/zlim; vmax = vt/kv; // calculate component values r2 = zlim*r3/rs; // calculate r1 at midpoint //r1 = vt/(((0.5*vmax)-vt)/r2+(rs*(0.5*imax)-vt)/r3); // calculate r1 at current endpoint r1 = vt/((-vt)/r2+(rs*imax-vt)/r3); // print results cout << "R2 = " << r2 << ",\t" << "R3 = " << r3 << endl; cout << "R1 = " << r1 << ",\t" << "RS = " << rs << endl; cout << "VT = " << vt << ",\t" << "PMAX = " << pmax; cout << ",\t" << "ZLIM = " << zlim << endl; cout << "Endpoints: " << vmax << "V,\t" << imax << "A" << endl; return 0; } |
Figure 15: Program output for parameters given |
| R2 = 5640, R3
= 47 R1 = 155.484, RS = 0.1 VT = 0.763, PMAX = 300, ZLIM = 12 Endpoints: 120V, 10A |
| Figure
16:
SPICE
plot
of
resulting
load
line |
 |
SPICE model |
Compensation
Since the safe-area limiter is a feedback circuit under limit, a stability analysis might be in order to determine if a compensation capacitor is needed between the collector and base of Q1. A well-known designer always uses a 0.1µF capacitor in that location.Not finished yet?
It remains to apply a safe-area limiter to a useful amplifier.|
|
Document History
March 16, 2013 Created.
April 5, 2013 Added an improved component calculation sequence
and additional power calculations.
December 9, 2015 Corrected two misspellings.