Copyright © 2014 by Wayne Stegall
Updated August 18, 2014. See Document History at end for details.
Perspective
The mathematics of
the perception of acoustic distance and the possibility of altering it
with equalization.
Introduction
Everyone has noticed the difference in the sizzle of lightning that
strikes close by as compared to the low bass rumble of that from afar
off. Likewise, there is a perceived difference in frequency
response of musical performances that conveys distance. The
atmosphere obviously filters high frequencies in a manner related to
the distance of transmission which the hearer then perceives as
perspective indicating
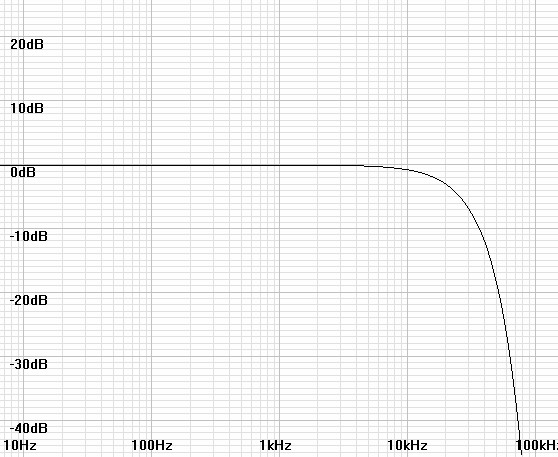
distance. I submit that intervening air acts as lowpass filter in
the form of distributed mass, compliance, and damping. Because
this filter is effectively an infinite number of consecutive
infinitesimal filters the response should then be an analog Gaussian
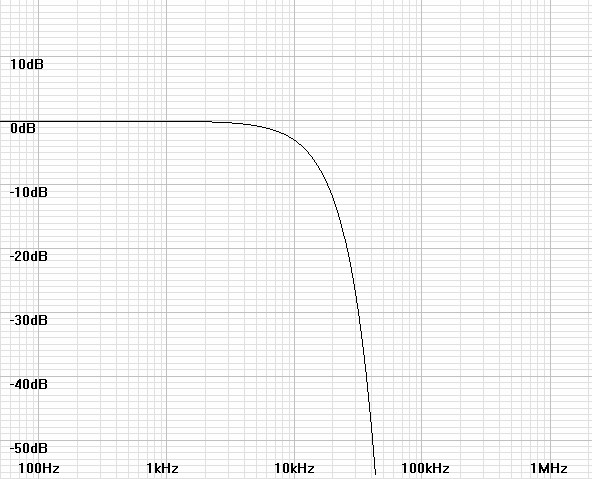
filter of some cutoff frequency determined by distance. This type
of filter droops in the transition band like a Bessel or first-order
lowpass filter and then falls off with increasing steepness in the
stopband.
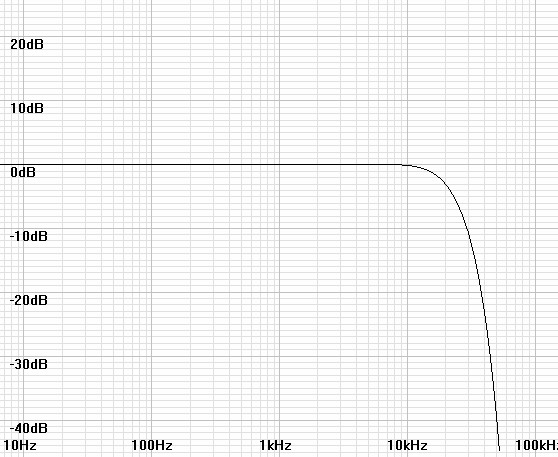
Figure
1:
Lowpass
Gaussian
(f0 = 10kHz)
|
|
Relating Frequency
Because Gaussians are usually specified for statistics, it becomes
useful to respecify them by frequency response.
First write equation with unknown constant.
Then specify that same equation down -3dB at cutoff frequency
f0.
Then solve for constant.
Relating Distance
Adding increments of distance is equivalent to joining consecutive
filters of unit distance. Consider first that filter magnitudes
multiply.
(6)
|
H(f) = e
|
–k1f2
|
× e |
–k2f2
|
× e
|
–k3f2
|
... × e
|
–knf2
|
|
|
|
|
|
|
|
|
|
|
|
Reducing the equation results in a useful result.
(7)
|
H(f) = e
|
-(k1+k2+k3
... +kn)f2
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Because the constants k
1 through k
n add in the
exponent, that indicates that the distance is related in that way
there. Therefore if we set k
Dd = k
1+k
2+k
3
... +k
n where d is distance and k
D is a new
constant then:
If in addition we set:
then frequency can be related to distance.
Ideal Equalization
Because the atmosphere is acting effectively as a mechanical Gaussian
filter, perspective can be lengthened by adding an additional
electronic Gaussian filter. Likewise perspective can be shortened
by adding an inverse Gaussian filter which is effectively like removing
a section of the mechanical Gaussian so modified.
Lowering f0
(or adding distance)
First quantify the addition of distance.
(12)
|
dnew = dold
+ dfilter |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Then derive a relation to frequency from
equations 10 and
12.
(13)
|
1
fnew2
|
=
|
1
fold2
|
+
|
1
ffilter2
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Then a final form can be derived.
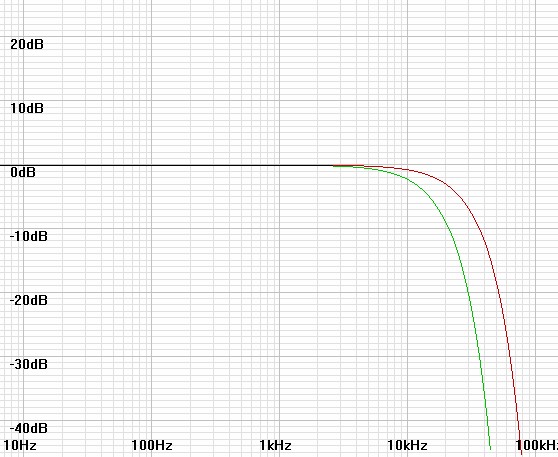
Example: Calculate filter frequency to lower cutoff frequency
from 20kHz to 10kHz.
Solution:
Rearrange equation 13 to obtain a filter cutoff frequency and solve.
(15)
|
ffilter =
|
1
|
=
|
1
|
= 11.547kHz
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
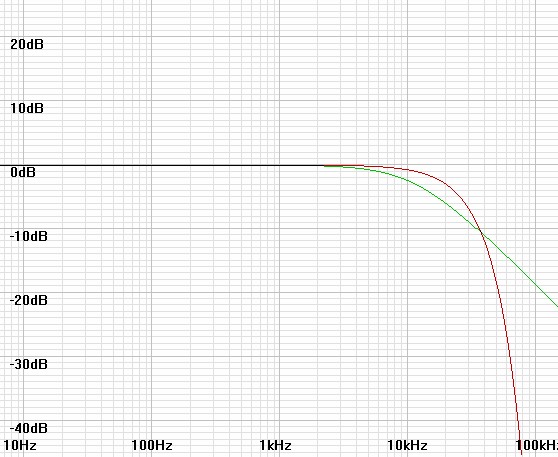
Figure
2: Response of 20kHz cutoff perspective in red, that of applied
filter of 11.547kHz cutoff in green.
|
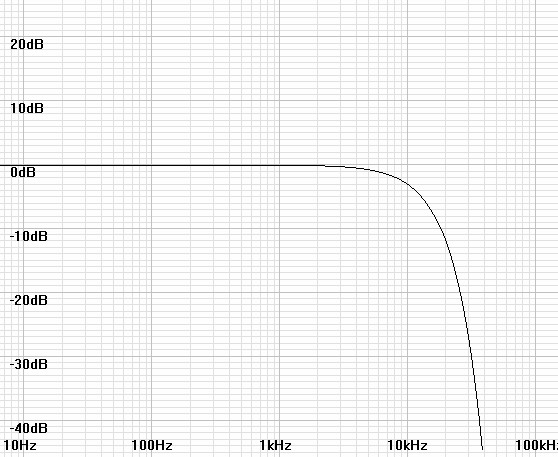
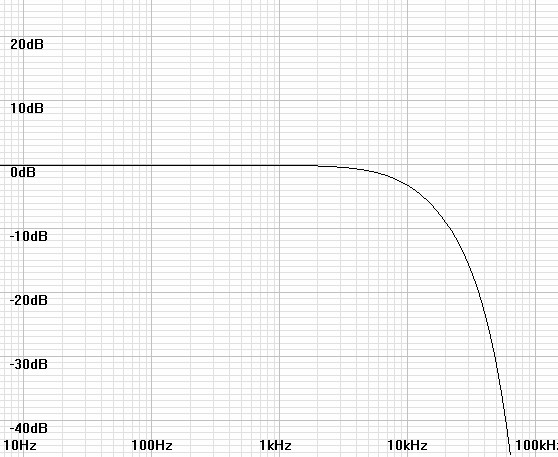
Figure
3: Combined response produces more distant perspective with 10kHz
cutoff. |
|
|
Raising f0 (or
subtracting distance)
First quantify the subtraction of distance.
(16)
|
dnew = dold
– dfilter |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Then derive a relation to frequency from
equations 10 and
16.
(17)
|
1
fnew2
|
=
|
1
fold2
|
– |
1
ffilter2
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Then a final form can be derived.
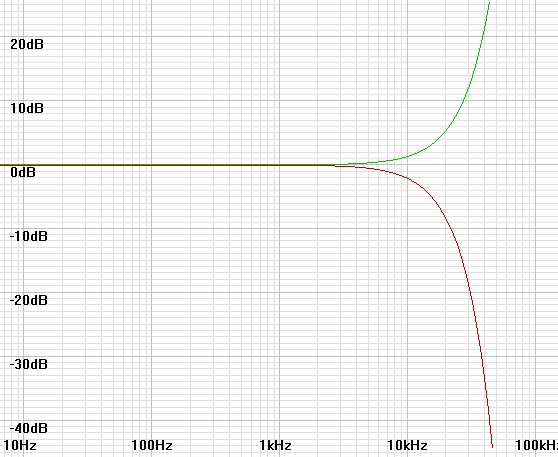
Example: Calculate the filter frequency to raise the cutoff
frequency from 12kHz to 20kHz
(19)
|
ffilter =
|
1
|
=
|
1
|
= 15kHz
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
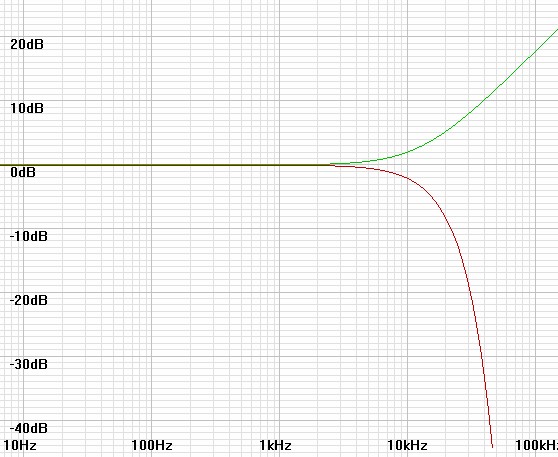
| Figure
4: Response of 12kHz-cutoff perspective in red, that of applied
filter of 15kHz 3dB boost in green. |
Figure
5: Combined response produces closer perspective with 20kHz
cutoff. |
|
|
Practical Equalization
The Gaussian filters depicted to change the perspective above are only
realizable as digital filters. Because many would rather equalize
using analog filters, I here explore the outcome of using first-order
poles or zeros for equalization.
Lowering f0
(or adding distance)
Because a first-order lowpass filter has similar droop in the
transition band to that of a Gaussian, it is reasonable to think that a
more distant perspective could be created using it in place of the
ideal Gaussian filter. In
figures
6
and
7 below, I add a first-order filter of the same 11.547kHz
cutoff frequency as the Gaussian and get plausible results.
| Figure
6: Response of 20kHz cutoff perspective in red, that of applied
filter of 11.547kHz pole in green. |
Figure
7: Combined response produces more distant perspective with 10kHz
cutoff, nearly as well as with adding the Gaussian filter above. |
|
|
Raising f0 (or
subtracting distance)
When I added a filter of zero at the 15kHz calculated for an inverse
Gaussian, the response at 20kHz was below the target of -3dB. A
zero at 12kHz produced a result with a small amount of ripple.
The third trial of a 13kHz zero produced the desired results.
| Figure
8: Response of 12kHz-cutoff perspective in red, that of applied
filter of 13kHz zero in green. |
Figure
9: Combined response produces closer perspective with 20kHz
cutoff. However the transition band has less droop than the
Gaussian result. |
|
|
Limitations
Because the Gaussian response falls off so fast in the stopband, it
seems that lengthening the perspective is a much easier task than
shortening it. Even shortening the perspective with the ideal
inverse Gaussian is very limited if practical gain limits such as 20dB
are imposed. In that case the cutoff frequency can only be raised
by a factor of 2.5 or so by inspection of
figure 1 and less with a
first-order analog zero.
Also because this acoustic effect varies greatly with atmospheric
pressure, temperature, and humidity, it may be difficult to pin down
exact Gaussian cutoff frequencies for real listening conditions.
1
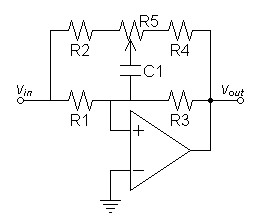
A Circuit
As for choice of analog equalizer, just a normal treble control with
high pole/zero frequencies is recommended. A control such as in
figure
10 will have complimentary poles and zeros that cancel at the flat
setting. Then when adjusted, the zero drops in frequency and the
pole rises when adjusted for boost and likewise the pole drops and the
zero rises when adjusted for cut. If the flat pole/zero frequency
is set above 20kHz by enough that a clean pole or zero is brought into
band on adjustment, then the desired equalization adjustment is
facilitated.
Figure
10:
A
high
frequency treble adjustment
|
|
Parts List
R1, R3
|
6kΩ |
R2, R4
|
1kΩ |
R5
|
10kΩ potentiometer
|
C1
|
2.7nF
|
|
Note: You may want to experiment
with different values for effect on range of adjustment.
|
1International Standard ISO
9613-1 "Acoustics – Attenuation of sound during propagation outdoors,"
1993-06-01. This document did not deal directly with the desired
topic of Gaussian frequency response but rather with tabulating
attenuation constants for distance for multiple variables of frequency,
temperature, pressure, and humidity in other terms.
Document History
August 16, 2014 Created.
August 18, 2014 Corrected some misspellings and grammar, improved
some wording, and completed footnote.


